








工业机器人是一种适用于工业领域的多关节机械手或多自由度机器装置,可以自动执行相关的工位工作。工业机器人是依靠自身动力和控制能力实现各种功能的机器。现有技术中,机器人第七轴通过在机器人第七轴上装配地轨,可以在不同工位之间移动,同时利用第七轴实现机器人在不同工位之间有序移动,依次完成整套工序,从而实现不同工序之间自动操作的全自动连接。在操作过程中,现有技术手段中的工业机器人只能按照一套预设的工业流程进行自动化操作,具有生产和应用的单一性;并且同时,当机器人与其他物体发生碰撞或发生故障时,也无法及时停止故障排除。

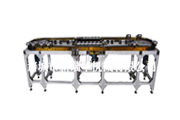
本文中,我们将为大家介绍一种机器人第七轴行走装置,以解决现有技术中工业机器人生产作业应用单一,出现隐患无法及时停止作业的技术问题。本文介绍的机器人第七轴行走设备包括:地轨和与地轨滑动连接的六轴机器人机构,其中,机器人第七轴机构包括固定安装在机器人第七轴机构边缘的电控箱,用于控制机器人第七轴机构的操作;紧急停止互锁装置包括感应机器人第七轴运行时是否发生故障或碰撞的感应器,以及与感应器电连接的用于控制发生故障的六轴机器人机构的紧急停止机构,感应器安装在机器人第七轴机构上;控制中心与机器人第七轴机构电连接,用于控制六轴机器人机构实现工位间的任意工位工作。优选地,紧急停止机构还包括紧急停止按钮,其安装在机器人第七轴机构或地轨上,并与机器人第七轴机构和紧急停止机构电连接,用于控制七轴机器人机构的操作。机械臂上设有控制中心,控制中心与紧急停止按钮、感应器和控制中心电连接。优选地,控制中心一端与第一轴的顶部固定连接,控制中心的另一端与第二轴转动连接,第一旋转电机的输出端与控制中心的端部固定连接,用于驱动第二轴相对于控制中心转动。
本文介绍的机器人第七轴行走设备中的上述一种或多种技术方案至少具有以下技术效果之一:机器人第七轴行走设备包括七轴机器人装置、急停联锁装置和控制中心。使用时,机器人七轴行走设备通过机器人第七轴装置实现多工序作业,并通过地轨实现七轴机器人在不同工序之间的运动。为了实现机器人第七轴在不同工位的作业,机器人在地面轨道上的运动由安装在六轴机器人机构上的电控箱控制,在控制中心的作用下向六轴机器人机构发送不同的指令,使七轴机器人机构可以实现任意工序之间的转换作业,而不受单一工序的限制。机器人第七轴行走设备中设置了紧急停止联锁装置。当七轴机器人发生故障或碰撞时,向急停联锁装置发出信号,急停机构发出报警。工人停止七轴机器人的操作,直到隐患消除,然后再次启动七轴机器人进行操作。有了上述设备,当机器人第七轴行走设备在站与站之间运行时,控制中心可以实现多站无序运行,由于设置了急停联锁装置,当出现意外情况时,设备可以发出警报,及时停止调查。