








机器人是一种自动做功的机械装置。它不仅能接受人类的指挥,还能运行预先安排好的程序,还能按照人工智能技术制定的原则和程序行动。它的任务是辅助或代替人类的工作,如生产、建筑或危险工作。机器人的第七轴是行走轴。当机器人应用于加工生产技术领域时,需要使用第七轴来完成物品的运输和移动。现有的机器人第七轴大部分都是轨迹的形式。机器人放置在轨道上,利用驱动系统驱动机器人在轨道上运动,达到运输和移动物品的目的。但现有机器人第七轴结构存在以下缺陷:现有机器人第七轴上进行其他六轴工作时,机器人的平衡性不好,使得机器人的加工容易出现偏差,甚至损坏机器人,不利于加工生产过程,增加生产成本。现有机器人第七轴大多驱动机器人在轨道上运动,但这会使机器人的定位不准确,使机器人的位移出现偏差,影响机器人的加工效果和产品质量。为了解决这些问题,设计了机器人第七轴结构。

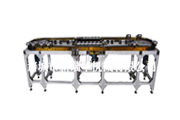
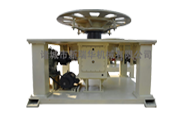
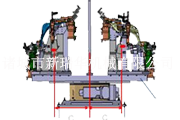
为了克服现有技术方案的不足,本文为大家提供了一种机器人第七轴结构,可以使机器人的稳定性更好,防止机器人加工偏差,同时使机器人的运动和定位更加准确,有利于提高加工产品的质量,值得推广。本实用新型所要解决的技术问题是:一种机器人第七轴结构,包括两条平行的轨道,轨道均为T形结构,轨道底面的左右两端与限位板固定连接成L形结构,限位板相对于轨道呈镜像对称,两条轨道的正上方设有机体,机体底面的左右两端连接有与轨道和限位板相啮合的配合件;一条轨道内表面的前后端分别设有步进电机和第一转轴槽,另一条轨道内表面的前后端分别设有第二转轴槽和第三转轴槽。作为本实用新型的优选技术方案,限位板的左右两侧通过阻尼弹簧连接有阻尼垫。作为本实用新型的优选技术方案,两条轨道由两个限位杆连接,两个限位杆分别位于第一转轴和第二转轴的正上方。
与现有技术相比,本实用新型机器人第七轴具有以下有益效果:
(1)本文介绍的机器人第七轴的轨道均为T形结构,轨道底面的左右两端固定连接有相对于轨道镜像对称的L形限位板,两个轨道正上方设有机体, 机身底面的左右两端连接有与轨道和限位板相啮合的配合件,使机器人本体能够与轨道紧密连接。 并且能够有效防止机身逃离或偏离轨道,使得机器人在轨道上进行其他六轴活动时,机器人的稳定性更好,机器人的加工更精准,能够防止机器人的损坏,有利于加工生产。
(2)在机器人第七轴中,步进电机和第一转轴槽分别设置在一条轨道内表面的前后端,而第二转轴槽和第三转轴槽分别设置在另一条轨道内表面的前后端。因此,机器人由步进电机和履带驱动,而不是在轨道上主动运动,这使得机器人的运动控制更加方便,机器人的运动定位更加准确,防止了机器人运动的偏差,有利于提高加工产品的质量,使机器人的应用效果更好,增加生产利润。